
Pentru că într-un articol precedent am vorbit despre convertorul ridicător (boost), în acesta am decis sa scriu câte ceva și despre convertorul coborâtor (buck). Convertorul buck, cunoscut ca și convertor coborâtor (step-down), este un convertor care prezintă o structură asemănătoare cu cea a convertorului boost, dar acesta produce o tensiune stabilizată mai mică decât tensiunea de la sursa de intrare. Convertorul buck ideal este compus din 5 componente de bază: comutatorul semiconductor de putere, o diodă, un inductor, o capacitate și un controller PWM. Circuitul este prezentat mai jos:

Modul de funcționare al convertorului buck este datorat relației dintre curent și tensiune dată de inductor. În poziția inițială comutatorul este în poziția deschis iar curentul în circuit este 0. Când comutatorul este închis (pasul 1) curentul pe inductor începe să crească, iar tensiune tinde să scadă. Această cădere de tensiune de pe inductor este înseriată cu căderea de tensiune de pe sarcină realizând o limitare a tensiunii pe sarcină. În tot acest timp inductorul acumulează o cantitate de energie pe care, ulterior (pasul 2), o eliberează în circuit prin intermediul diodei (D1).

Comanda acestui convertor se poate face în două moduri:
1.Comanda în frecvenţă constantă, sau controlul prin modularea impulsurilor în durată (PWM)
2.Comanda în frecvenţă variabilă, sau controlul prin modularea în frecvenţă.
La prima metodă, reglarea tensiunii de ieşire este făcuta prin modificarea intr–o direcţie sau alta, a factorului de umplere a tensiunii de comandă a comutatorului, cu păstrarea constantă a frecvenţei. Factorul de umplere se referă la raportul dintre durata cât comutatorul este închis şi perioada semnalului de comandă. Acest mod de control este adeseori preferabil.
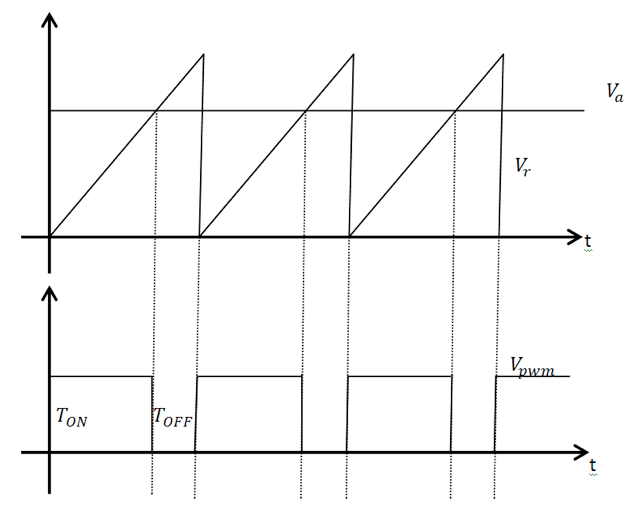
Formarea semnalului de comandă pentru această metodă se face prin compararea unei tensiuni de referință cu o formă de undă dinți de ferăstrău. Prin modificarea tensiunii de referinta se modifică si factorul de umplere al semnalului PWM.



Pentru dimensionarea componentelor am realizat un program de calcul. Inductanța și capacitatea este calculată mai jos. Dioda este una de tip Schottkey, dar trebuie avut grijă ca aceasta să fie aleasă în funcție de curentul și frecvența dorită. Dispozitivul semiconductor de comutație trebuie sa fie dimensionat la o valoare superioară celei rezultate, pentru a suporta o tensiune și un curent superior celui necesar (pentru siguranță). Această aplicație este proiectată pentru un curent de ieșire constant.



Un articol foarte bun, felicitari!
Am un motor de 24V\17A,,cu frînă electromagnetică și vreau să : 1)- schemă de regulator turație de 12V-50V\200A. 2)-cu schimbare sensul de mers a motorului 3)-indicator voltaj baterie cu ledeuri s-au display 3)-,termometru ptr motor.4)-schema să fie cît mai simplă să nu necesite program ptr calculator ,ptt că eu sînt electronist mediu.Vă mulțumesc și aștept răspuns.P.s.-acest regulator de turație vil cer ptr alimentare pe bateri cu Pb s-au din cele mai speciale,v-am dat plaja de voltaj 12-50V ptr că;1)-sînt motoare de c.c. cu colector cu peri cărbune s-au fără,de diferite tensiuni(12,24,36,48V) așa și cu amperaj baterie ;12…..150A,s-au P(W)motor ;10……1000W.
Coinbase offers simple and advanced trading platforms on Coinbase advance trade. It offers a secure and easy way to buy, sell, and trade digital assets online.
Your table is ready ? Play with us. Want to become rich ? Come here and become the winner and enjoy the never ending fun. Feel the royalty and enjoy yourself. Best site ever! https://j9korea.com/ 제이나인 안전 카지노
Learn everything about do my online class . Classdoer is the best platform for that expectations. Whether you call it distant learning, online learning, or cold learning, school aspects unlike during the COVID-19 pandemic. While some scholars are flourishing with this way of knowledge, many scholars don’t seem to be attractive in it. Some students may not be present at all. Others may be in presence, but they aren’t revolving in work or doing additional than the bare least.
Elevate your business with ASC’s expert in securing Legal metrology Registration and LMPC Certificate for your packaging products. Our team handled more than 500+ satisfied customers. Trust us to navigate the intricate regulatory landscape, ensuring your products comply with all LMPC Certificate requirements. Gain a competitive edge, build consumer trust, and stay up-to-date effortlessly with ASC by your side.
Read more-
LMPC Certificate
Indian Hindi Blue Film And Bf Sex Videos
TikTok MP3 is a tool that allows you to easily convert any TikTok video into MP3 format. Many people want to download the music used in TikTok videos for offline use in MP3 format.
Story Saver Instagram Story Downloader is a useful tool that lets you save Instagram stories without revealing your identity.
SaveInsta is a great tool for keeping and sharing the special moments from Instagram albums. With SaveInsta, you can keep celebrating and cherishing the important events and gatherings in your life, making memories that will last forever.
i Gram, a web-based platform, has been designed specifically to simplify the process of accessing and saving various forms of content from Instagram, including videos, photos, reels, IGTV content, and carousel albums.
i Gram is an Instagram downloader tool that allows you to download videos and photos from any Instagram profile. In addition to this, it also enables you to download the stories and reels shared by that profile.
Your website is very wonderful.
Amasya moving service exceeded all my expectations! Their team was incredibly professional, punctual, and handled all my belongings with utmost care. The entire process was smooth, efficient, and stress-free. They ensured everything arrived safely and on time, showcasing their commitment to top-notch service. If you’re looking for reliable and hassle-free moving in Amasya, I highly recommend them
อาหารเสริม ArtiFlex ด้วย Collagen Type II และสารสกัดธรรมชาติ ช่วยลดการอักเสบ ฟื้นฟูกระดูกอ่อนที่สึกหรอ ป้องกันข้อเสื่อม – เห็นผลภายใน 2 สัปดาห์! #ArtiFlex Website: https://www.artiflexth.com/